Public Member Functions | |
| CLOUDSATFileData (const string &name, const string &mode="r") | |
| constructor | |
| virtual | ~CLOUDSATFileData () |
| destructor | |
| void | load_geolocation_data () |
| read the geolocation data (latitude, longitude and time) This method is used to make the search of the indexes of a (lat,lon,time) point faster. | |
| void | free_geolocation_data () |
| free eventually loaded geolocation data If the geolocation data are not loaded, doesn't do anything | |
| const bool | contain_location (const float &lat, const float &lon, const double &tolerance=0.01) |
| check if this file has eventually data coincident with (lat,lon) Actually, it only tests if (lat,lon) is contained in the data's bounding rectangle. | |
| const bool | contain_data (const float &lat, const float &lon, const double &time, const double &colocation_tolerance=0.01) |
| check if the file has possible (lat,lon) coincidence | |
| const float | get_nearest_point_distance (const float &lat, const float &lon, const float coloc_tolerance=CLOUDSATFileData::colocation_tolerance) |
| compute the distance to (lat,lon) of the nearest point in the data If coloc_tolerance is given, it will compute only the distance of the points that have a distance to ( lat, lon ) inferior to coloc_tolerance | |
| string | get_product () const |
| access to the product name | |
| string | get_version () const |
| access to the version of the product | |
| const bool | get_index (const float &lat, const float &lon, int &nearest_pix_idx, const float colocation_tolerance=0.01) |
| find the index of the nearest point to (lat,lon) in the data. If (lat,lon) is not found or out of the colocalisation_frame, returned indexes are [-1,-1] | |
| virtual void | get_vindex (vector< vector< int > > &v_index, const float &lat, const float &lon, const float colocation_tolerance=0.01) |
| build the list of indices of pixels that are in colocation tolerance, sorted by increasing distance to (lat,lon) If (lat,lon) is not found or out of the colocalisation_frame, returns an empty vector | |
| const int | get_nb_geo_points () |
| retrieve the number of (lat,lon) pixels in the file | |
| virtual void | load_v_pixel () |
| load the list data pixels | |
| virtual void | close_data_file () |
| closes the file. | |
| virtual void | open_data_file () |
| opens the file. | |
| virtual void | get_pixel_coord (const vector< int > &ipix, float &lat, float &lon, double &time) |
| retrieve the coordinates of a pixel using its index | |
Static Public Attributes | |
| static const int | nb_vbins = 125 |
| static const int | nb_profile_max = 40000 |
| static const int | nb_layers = 5 |
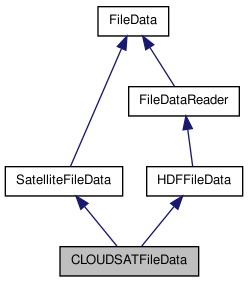
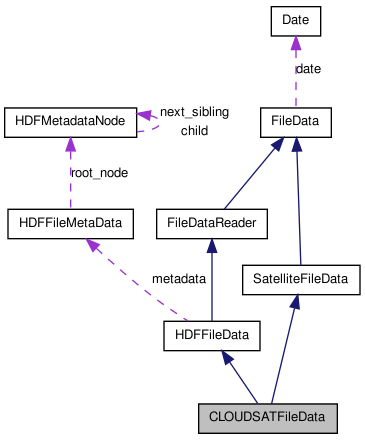
Detailed Description
Constructor & Destructor Documentation
| CLOUDSATFileData::CLOUDSATFileData | ( | const string & | name, | |
| const string & | mode = "r" | |||
| ) |
constructor
- Parameters:
-
name the filename mode opening mode. only "r" at this time
Member Function Documentation
| const bool CLOUDSATFileData::contain_data | ( | const float & | lat, | |
| const float & | lon, | |||
| const double & | time, | |||
| const double & | colocation_tolerance = 0.01 | |||
| ) | [virtual] |
check if the file has possible (lat,lon) coincidence
- Warning:
- it's an EVENTUAL coincidence. That is not a proof !!!
- Parameters:
-
lat latitude lon longitude time time colocation_tolerance the acceptable bias (in km or degrees. Supposed to be in, a plane approximation) between [lat,lon] and the nearest data point.
- Returns:
- true if can eventually contain a coincidence with the point.
- Warning:
- at this time always true. I don't have a good way to do it
Reimplemented from FileData.
References contain_location(), and FileData::contain_time().
| const bool CLOUDSATFileData::contain_location | ( | const float & | lat, | |
| const float & | lon, | |||
| const double & | tolerance = 0.01 | |||
| ) | [virtual] |
check if this file has eventually data coincident with (lat,lon) Actually, it only tests if (lat,lon) is contained in the data's bounding rectangle.
- Parameters:
-
lat the latitude of the event lon the longitude of the event tolerance acceptable bias between the nearest point in the data and the given (lat,lon) point
- Returns:
- true if a point in the data has been found in the colocation frame
Reimplemented from FileData.
References get_index().
Referenced by contain_data().
| const bool CLOUDSATFileData::get_index | ( | const float & | lat, | |
| const float & | lon, | |||
| int & | nearest_pix_idx, | |||
| const float | colocation_tolerance = 0.01 | |||
| ) |
find the index of the nearest point to (lat,lon) in the data. If (lat,lon) is not found or out of the colocalisation_frame, returned indexes are [-1,-1]
- Parameters:
-
lat the latitude lon the longitude nearest_pix_idx the index of the nearest measure. -1 if no coincidence found. colocation_tolerance the acceptable bias (in km or degrees. Supposed to be in, a plane approximation) between [lat,lon] and the nearest data point.
- Returns:
- true if the coincidence has been found
References free_geolocation_data(), SatelliteFileData::is_geolocation_data_loaded(), SatelliteFileData::lat_data, load_geolocation_data(), SatelliteFileData::lon_data, SatelliteFileData::time_data, and SatelliteFileData::v_pixel.
Referenced by contain_location(), and get_nearest_point_distance().
| const int CLOUDSATFileData::get_nb_geo_points | ( | ) | [inline] |
retrieve the number of (lat,lon) pixels in the file
- Returns:
- the number of (lat,lon) pixels
| const float CLOUDSATFileData::get_nearest_point_distance | ( | const float & | lat, | |
| const float & | lon, | |||
| const float | coloc_tolerance = CLOUDSATFileData::colocation_tolerance | |||
| ) |
compute the distance to (lat,lon) of the nearest point in the data If coloc_tolerance is given, it will compute only the distance of the points that have a distance to ( lat, lon ) inferior to coloc_tolerance
- Parameters:
-
lat the latitude lon the longitude coloc_tolerance the -/+ maximal tolerance for 2 points considered as colocated
- Returns:
- the distance to the nearest point, or -1 if no point in the colocalisation frame has been found.
References free_geolocation_data(), get_index(), SatelliteFileData::is_geolocation_data_loaded(), SatelliteFileData::lat_data, load_geolocation_data(), and SatelliteFileData::lon_data.
| virtual void CLOUDSATFileData::get_pixel_coord | ( | const vector< int > & | ipix, | |
| float & | lat, | |||
| float & | lon, | |||
| double & | time | |||
| ) | [inline, virtual] |
retrieve the coordinates of a pixel using its index
- Parameters:
-
ipix [IN] index of the pixel lat [OUT] latitude of the pixel lon [OUT] longitude of the pixel time [OUT] timestamp of the pixel
References SatelliteFileData::is_geolocation_data_loaded(), SatelliteFileData::lat_data, load_geolocation_data(), SatelliteFileData::lon_data, and SatelliteFileData::time_data.
| string CLOUDSATFileData::get_product | ( | ) | const [inline] |
access to the product name
- Returns:
- the product name
| string CLOUDSATFileData::get_version | ( | ) | const [inline] |
access to the version of the product
- Returns:
- the version of the product
| virtual void CLOUDSATFileData::get_vindex | ( | vector< vector< int > > & | v_index, | |
| const float & | lat, | |||
| const float & | lon, | |||
| const float | colocation_tolerance = 0.01 | |||
| ) | [inline, virtual] |
build the list of indices of pixels that are in colocation tolerance, sorted by increasing distance to (lat,lon) If (lat,lon) is not found or out of the colocalisation_frame, returns an empty vector
- Parameters:
-
lat the latitude lon the longitude colocation_tolerance the acceptable bias (in km or degrees. Supposed to be in, a plane approximation) between [lat,lon] and the nearest data point.
- Returns:
- the list of indices of pixels
Member Data Documentation
const int CLOUDSATFileData::nb_layers = 5 [static] |
Maximum number of layers for a CLOUDSAT 2B-GEOPROF-LIDAR product
const int CLOUDSATFileData::nb_profile_max = 40000 [static] |
Maximum number of profiles for a CLOUDSAT orbit
const int CLOUDSATFileData::nb_vbins = 125 [static] |
Number of vertical bins of a CLOUDSAT profile (fixed)
The documentation for this class was generated from the following files:
- /home/pascal/depot/filedata/src/cloudsatfiledata.h
- /home/pascal/depot/filedata/src/cloudsatfiledata.cpp
